xArm よくあるご質問
外部インターフェースの仕様を教えてください
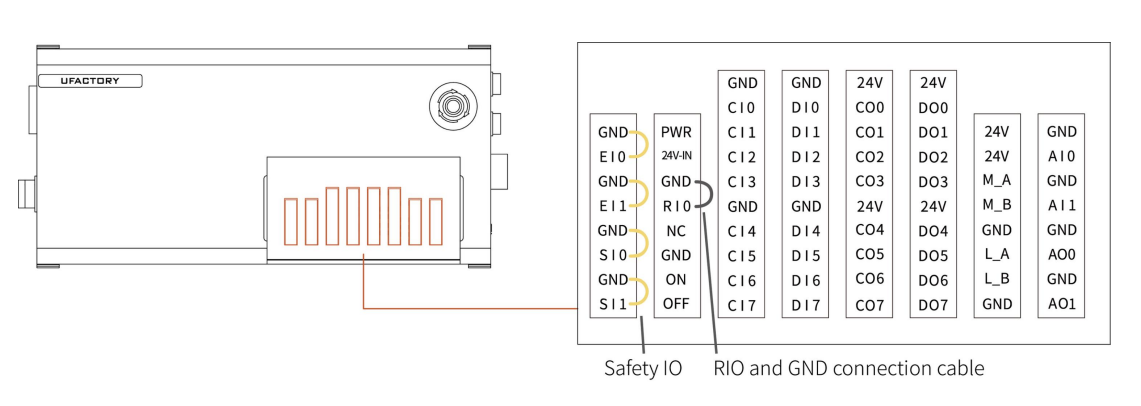
- コントローラー背面に外部インターフェースが付与されています。
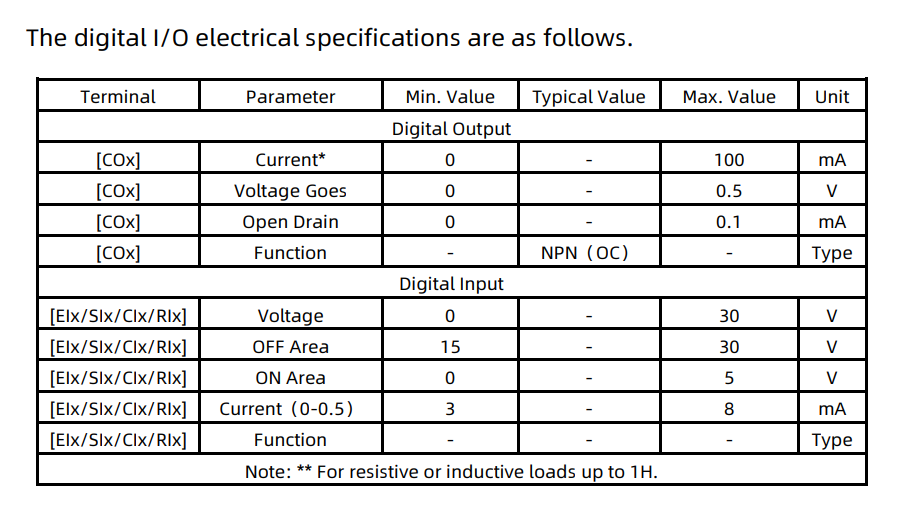
- 入力は負(0~5V)でON、正(15~30V)でOFFです。
- CIx系が設定可能なインプット、EIxが非常停止系、SIxが一時中断系になりますRIxはリセット動作用のピンで通常は使用しません。
- 詳細は下表をご覧ください
衝突や急激な動作をしていないのにエラーが出て停止します
- 「C31: Collision Caused Abnormal Current」または「C22:Self-Collition Error」が発生しているが、特に衝突など目立った外観の問題が無い場合、IK(逆運動学)の軸角度を決定できず、エラーをだすケースがあります。主なケースは以下の通りです。
- ロール・ピッチ・ヨーを多用する
- 動作限界に近い点で操作
- ある特定の姿勢Aから姿勢Bに移動する際、特定の軸だけが急に動作する
- 対策としては、下図(C31のケース)のようにUFactory/xArm StudioのControlコンソールにて、特定の軸が可動限界になっていないか確認し、それがぞ実であればマニュアル操作にて安全姿勢に移行して頂く事で対処できます。

初期姿勢まわりの設定について教えてほしい
- 初期姿勢に相当する機能は「ゼロ姿勢」「初期姿勢」の二つが存在しています。
- 「ゼロ姿勢」は各軸がゼロベース点に移動します。出荷箱での姿勢と同一で、これは変更できません。
- 「初期姿勢」はユーザーが設定可能です。
- デフォルトでは「ゼロ姿勢」と同一です。
- Setting -> Motionの中にあるInitial Positionにて設定が可能です。
- 設定ツールはxArm/Ufactory Studioの操作インターフェイスと同系統です

公式の6軸トルクセンサーの値はどう取得すればよいか
- 読み取りや稼働状態の確認はUFactory Studioから「Settings」->「Tools」->「Force Torque Sensor」の画面にて確認可能です。
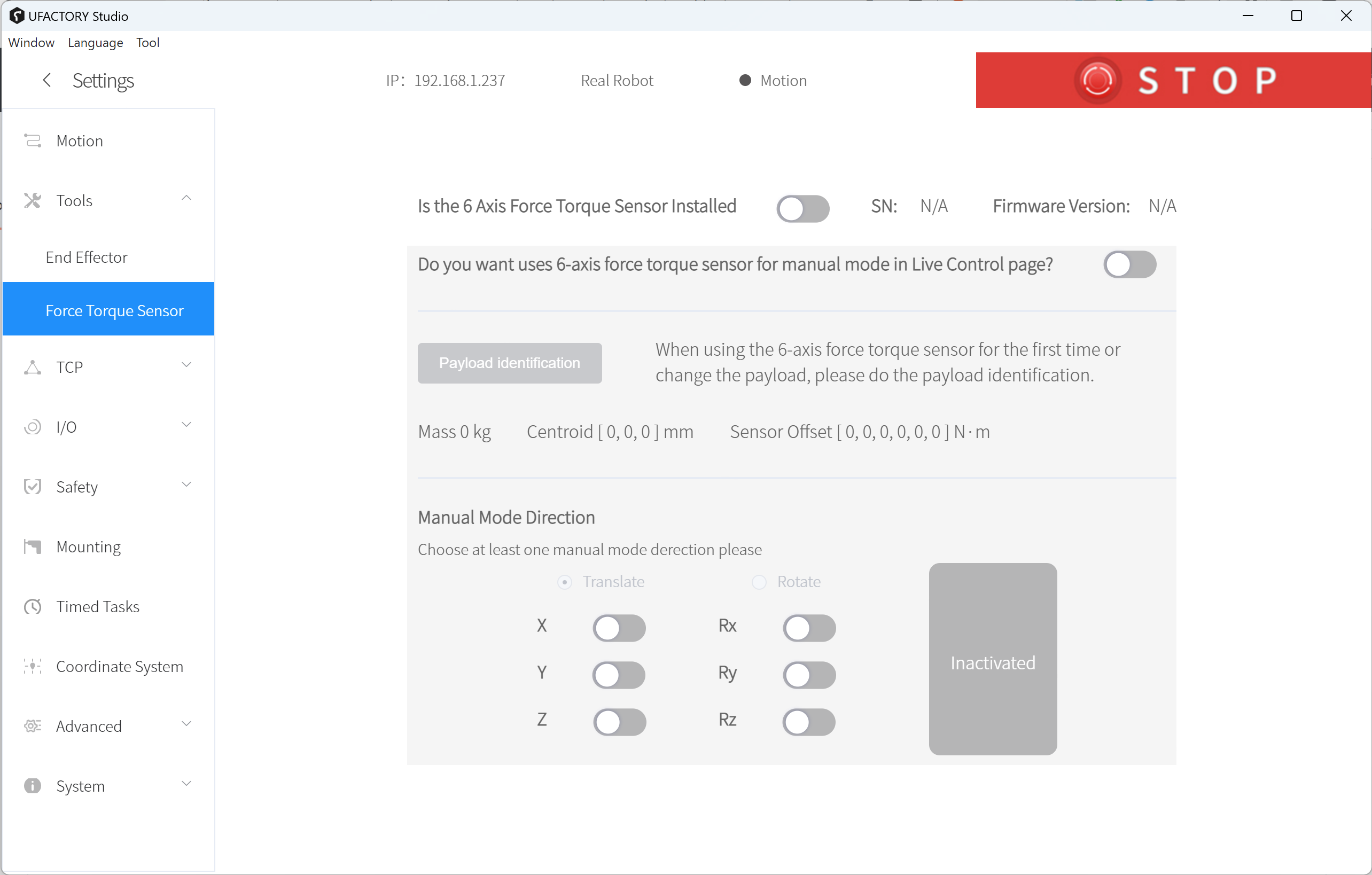
- ソフト側から活用する場合、Python SDKを経由した方法がございます。サンプルコードはSDK内の「8003-force_control.py」をご参照ください。
- https://github.com/xArm-Developer/xArm-Python-SDK
ネットワーク情報を誤って書き換えました。IPアドレスのリセット方法を教えてください
- 非常停止ボタンをおした状態で、電源を抜き5分ほどまちます。
- 下図のように、RI0とGNDをつないでください。
- 電源を再度投入し、BEEP音がなるのを待ちます。この段階で192.168.1.111にリセットされます。
- ブロックを抜き取り、RI0をGNDから外してください。その状態で1分ほどまちます。
- 作業PCを192.168.1.Xの同一サブネットに接続した状態で、192.168.1.111にUFactory StudioかWEBブラウザ(前述)で接続してください。
- [Settings] →[System Settings] → [Network Settings]をたどり、ご希望のネットワーク情報に更新してください。
- 電源を再投入し、再設定たIPアドレスで接続できる事を確認してください。